写在前面:本文由课题组2017级硕士生张小卉撰写,现已发布在公众号“机器之心”,点击阅读原文
引言:无人车的领头羊Waymo的CEO曾对外宣称,Waymo无人驾驶系统80%的改进都来自其仿真系统Carcraft。那么身为头号功臣的无人驾驶仿真到底是什么?而其中的交通流仿真又是何物,有何可用平台,请看来自交通工程的跨界思考。
1. 驶向Vision Zero的无人驾驶
据世界卫生组织最新数据显示,每年约有135万人由于道路交通事故而死亡,其中超过90%的交通事故是人为因素造成的[1]。而无人驾驶从不醉酒、分心或是疲劳,这些因素分别占所有致命事故起因的41%、10%和2.5%。生命可贵,是任何其它社会利益都无法交换的,这也是 Vision Zero(无人伤亡的全球性道路交通安全项目)的核心原则[2],而无人驾驶是实现 Vision Zero的重要途径。
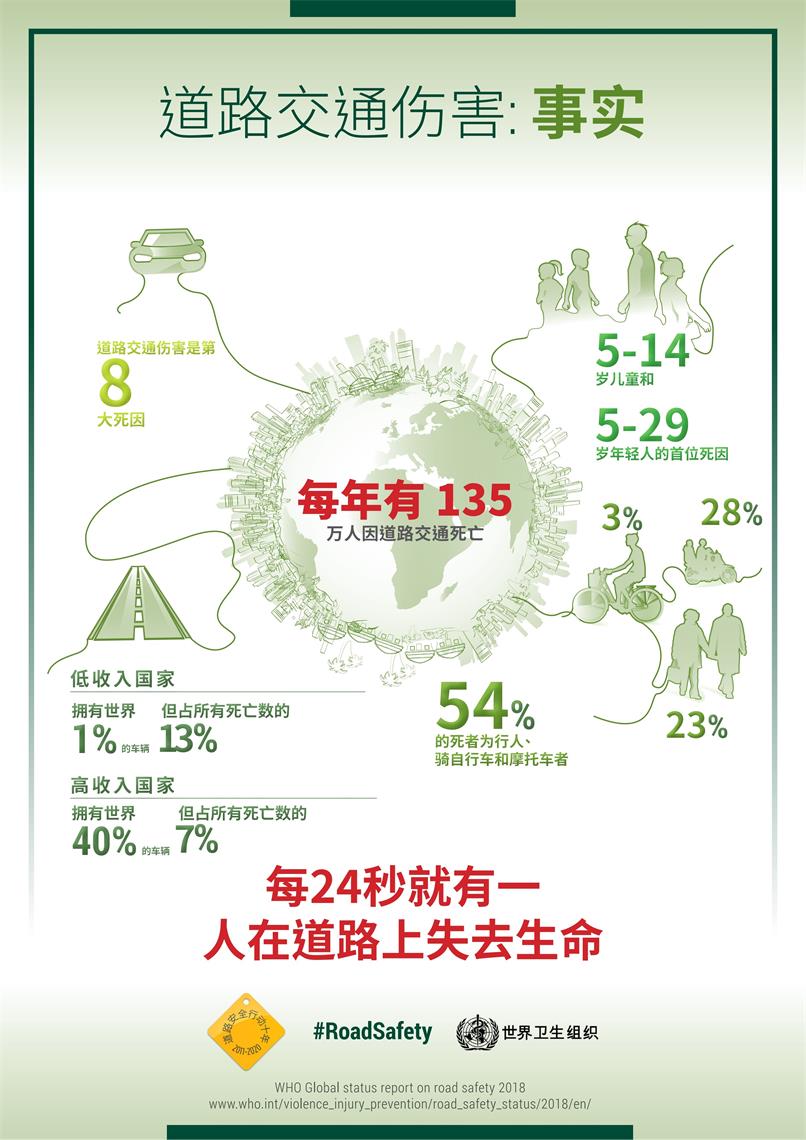
全球道路交通伤害[1]
2. 多少里程可以验证安全?
然而无人驾驶也面临着许多挑战,比如恶劣的天气、复杂的交通环境等等,因此在某些场景下的表现可能无法匹敌人类驾驶员,甚至存在新的更加严重的事故风险(如网络攻击)。那么无人驾驶到底如何才能证实其安全性?
著名战略咨询公司兰德就无人驾驶的安全可靠性及所需路测里程进行了统计分析[3],其分析报告显示,在95%的置信度下,无人驾驶系统需要进行约50亿英里的路测才可证明其事故率显著小于人类驾驶员,也就是100辆车在全天24小时、全年365天及平均车速为25英里每小时的情况下,需要测试约225年!
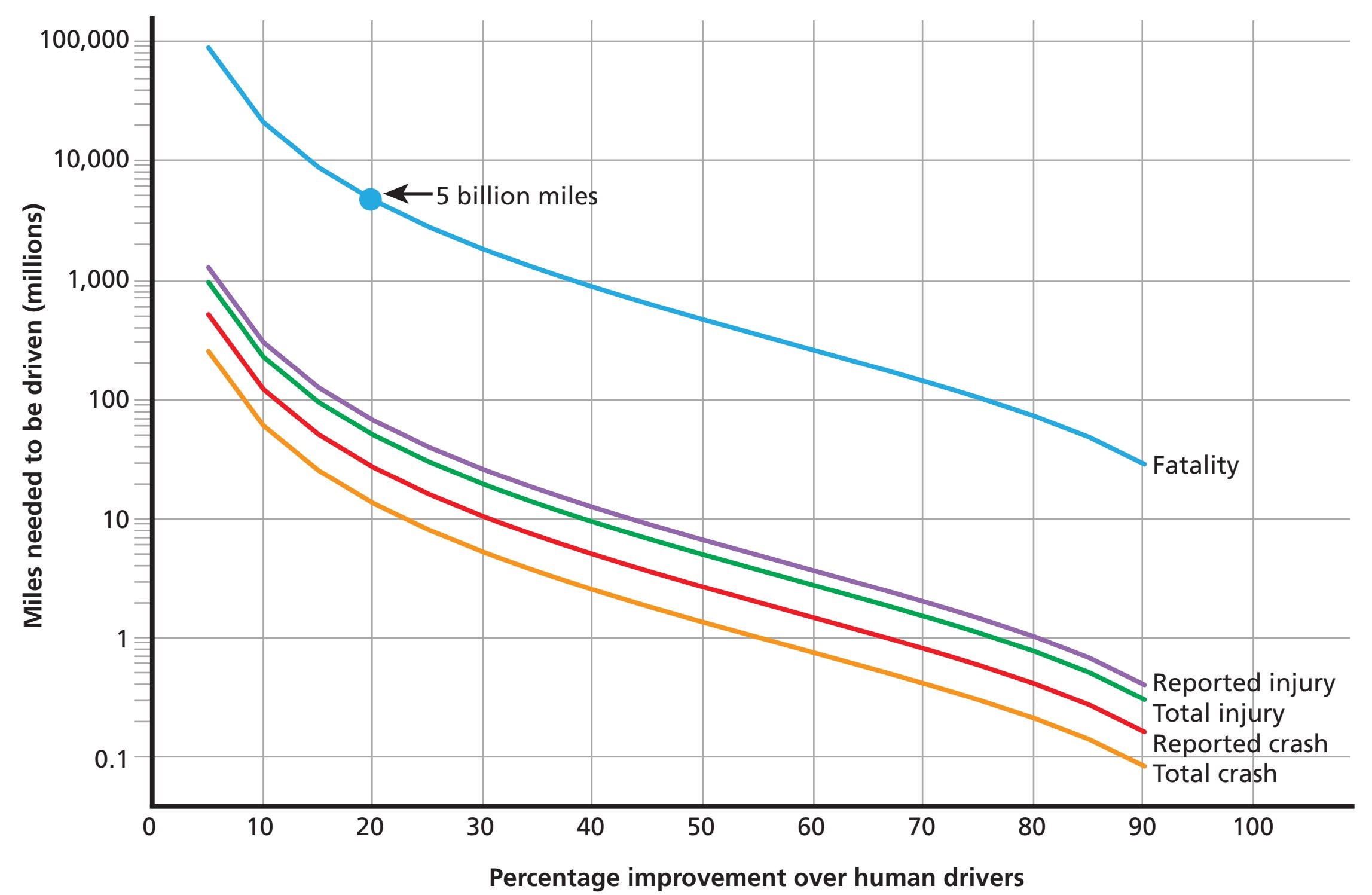
95%置信度下所需路测里程[3]
3. 仿真是第一生产力
仿真在无人驾驶的开发测试及评价过程中是必不可少的。在2016年Waymo 在其仿真系统Carcraft的测试里程已突破 25 亿英里,每天测试里程可以达到 800 万英里,而全年实际路测里程仅 300 万英里[4,5]。Waymo的CEO曾对外宣称,Waymo无人驾驶系统80%的改进都来自其仿真系统Carcraft。
“长远来看,我们做无人车的单位必须要坚持一件事,模拟环境必须占到绝大部分发展过程。99%安全验证应该是在模拟环境情况下做出来的,0.9%左右应该在TestTrack做,最后少部分在公共交通道路来做”,密歇根大学MCity移动出行中心主任彭晖教授在2018 国际汽车智能共享出行大会如是分享[6],基于计算机仿真技术对自动驾驶系统进行虚拟测试与评价已经成为行业普遍共识[7]。
具体来说,无人驾驶仿真系统由虚拟场景与无人驾驶车辆组成[8],其中无人驾驶车辆包括车辆模型、动力学模型、传感器模型,而虚拟场景则可以进一步分为动态与静态层次,路网(Layer 1)、交通设施(Layer 2)属于静态层,交通管控造成的道路或交通设施的临时性改变(Layer 3)、交通流(Layer 4)、环境条件(Layer 5)均属于动态层。
路网指车道级的道路信息,交通设施为实现交通管理、安全防护的道路基本设施,如交通标志、防护栅栏等。第三层则为临时性交通管理与控制,如车道临时封闭、改变限速等。第四层交通流是指道路上连续行驶形成的车流,古有“车水马龙”之说,车如流水,马如游龙,也正是交通流的含义。最后一层环境条件则是天气等自然环境。
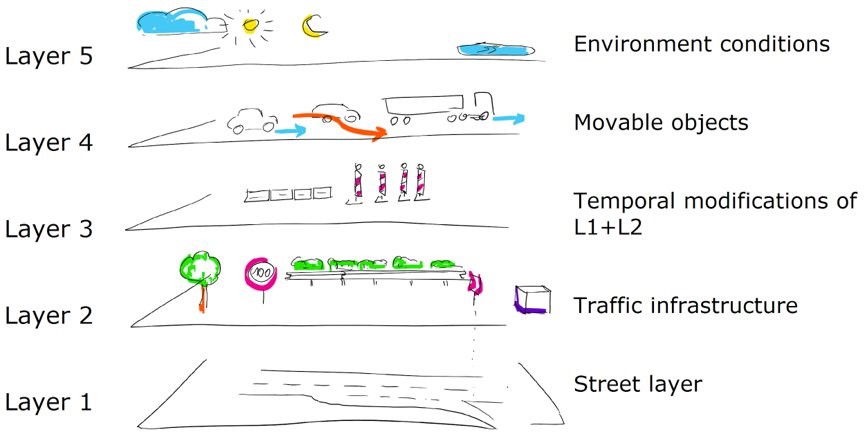
虚拟场景的五个层次[9]
4. 什么是交通流仿真?
交通流是动态层中最为复杂多变的要素,但是现有的虚拟测试工具(开源如百度的Apollo,Intel的CARLA,微软的AirSim;其它如PreScan,VTD)都缺乏高逼真度交通流场景模拟能力,因此无法满足高等级自动驾驶测试需求。而无人驾驶仿真中的交通流仿真目前其实是微观交通流仿真,主要研究每个车辆-驾驶员单元的行为交互,相应的宏观层面则将交通流视作由大量车辆组成的可压缩连续流体介质,关注如车流平均速度以及平均密度等的集计属性。
在交通工程领域,微观交通流理论的研究由来已久,从20世纪50年代起开始涌现以跟驰模型为核心的众多微观行为模型[10]。而利用微观交通流理论构造的微观交通流仿真一直以来都是交通系统评价、改善的利器,如交叉口进口道渠化方案评价、信号灯配时改善等等。

交叉口信号灯配时方案的仿真场景[11]
而现在,微观交通流仿真作为无人驾驶仿真中重要的一环,通过系统性地构造多样的交通场景从而满足测试需求。这里作为交通工程师非常欣慰的一点是,交通流仿真不再局限于传统的交通工程中,渐渐走进自动驾驶领域,开始焕发出新的活力,相互交融碰撞的未来值得大家一同探索。
5. 交通流仿真的新进展
新的交融也带来新的改变,在传统交通工程领域中,微观交通流仿真的本质在于驾驶行为建模,通过机理解读,剖析人类驾驶行为并建立解析模型,而随着人工智能的发展,众多机器学习方法也逐渐得到应用,如通过拟合真实驾驶数据学习人类驾驶行为或是通过强化学习得到最优驾驶策略,但不论是机理型解析模型还是机器学习模型,原有的微观交通流仿真总体而言都是由内而外的,因为真实交通场景(表现为交通参与者的轨迹)是最外层可观察到的现象,而产生不同交通场景的本质就是异质的驾驶行为,因此从驾驶行为的解析到交通流场景是自然的发展。
相对而言,新兴出现的数据导向的方法则是选择了直接再现可观察的现象,即通过各类传感器采集真实交通场景,经处理后导入仿真场景中;同时基于真实数据的泛化构建更多的交通场景[7]。Waymo在其安全报告中也提到一种模糊化的方法,即合理地更改真实场景的某些数据特征,泛化生成新的场景[12]。

Carcraft中再现的真实交通场景[4]

模糊化泛化生成新的交通场景[4]
针对新兴的数据驱动的再现及泛化交通场景的方法,其最大的缺点是每一个场景都是固定的一组数据,因此无法与无人驾驶车辆进行交互,从而大大降低了测试的真实性和有效性。其次,仅仅作为数据集来看待的交通场景缺乏物理意义,比如,你很难回答到底需要怎样的场景数据,为什么,而这对于系统性地测试和验证都至关重要。
同时泛化的特征是否为核心属性并存在相应物理意义,是否符合真实的统计分布,泛化得到的数据是否合理,比如单车的轨迹扰动有时会造成整个交通流的失稳,而简单地遍历数据特征无法重现此现象。归根结底,仅仅通过流于表面的数据处理无法构建有效的交通流场景,我们需要透过现象看本质,理解交通流中每个车辆单元的驾驶行为。
6. 回归机理的核心模型
在交通工程领域的微观交通流模型中,交通流被视为由大量车辆组成的复杂自驱动粒子系统。以单个车辆为研究对象,建立车辆运动规律及相互作用模型,主要包括纵向的跟驰模型和横向的换道模型。
跟驰行为是最基本的微观驾驶行为,描述了在限制超车的单车道上行驶车队中相邻两车之间的相互作用。跟驰模型是研究前车运动状态变化所引起跟驰车的相应行为[13]。
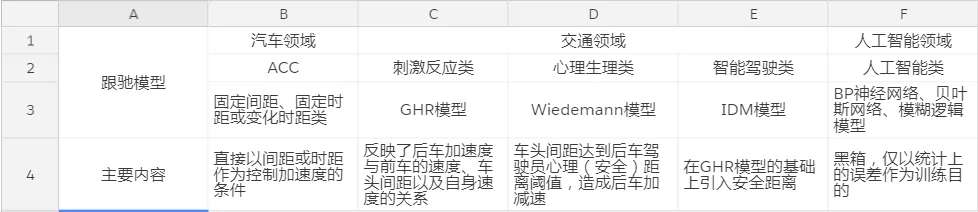
按照现有的分类方式,跟驰模型分为交通工程学和心理生理学两大类,或者是交通工程和统计物理两大类,虽然分类方法有所差异,但是所指的模型均为过去六十多年跟驰行为建模研究中的典型模型[13]。其中主要包括汽车领域中实际应用的ACC中的模型,交通领域中的刺激反应类、心理生理类模型以及人工智能类模型等,如下表所示:
换道模型是微观交通流理论中的另一核心模型[14],可分为强制换道和自由换道:强制换道是指车辆为了完成其正常行驶目的而必须采取的换道行为,自由换道是指为了追求更快的车速、更自由的驾驶空间而发生的车道变换行为。两类换道行为均可拆解为四个步骤:动机产生,车道选择,间隙选择,换道执行。

动机产生:每一车辆都有期望车速,即在不受其它车辆约束的情况下驾驶员所希望达到的最大车速。期望车速与车辆机械性能、驾驶员特性、道路的限速措施等有关。当车辆在当前车道行驶时,由于受到前方慢车的影响而使其车速低于其期望车速的一定数值范围内,则车辆会产生任意性的车道变换意图。而强制性换道的动机则由车辆行驶路径与车道功能的不匹配产生,如右转需要进入右转专用道,因此车辆必须换道进入该专用道进行右转。
车道选择:对于自由性换道,考虑备选期望车道的平均车速、前车间距等建立效用模型,选择效用大的一侧车道进行换道。对于强制性换道,车辆会向着距离目标车道更近的车道换道。
间隙选择:判断目标车道的前后换道间隙是否满足可接受间隙,可接受间隙隐含了接受后车一定程度减速的意愿。此可接受间隙一般认为与目标车道前后车的速度差,与强制换道临界点的距离相关。
换道执行:学术界研究较少,一般首先考虑本车速度与车长确定换道长度,再规划平滑的轨迹曲线,如五次多项式或贝赛尔曲线。
7. 可用平台?支持国产!
现有的微观交通流仿真平台多为传统交通工程领域内的专业软件,其发展可追溯到20世纪末,随着我国快速的城镇化、机动化进程,各大城市相继出现严重拥堵问题,对城市交通改善方案的精准评估需求催生了大量仿真分析需求,国外微观交通仿真软件开始涌入中国市场。下面介绍三个典型的专业仿真软件,分别是德国的Vissim,SUMO以及中国的TESS NG。
VISSIM: PTV 集团(保时捷汽车控股公司于2017年收购)下的成熟商业微观交通流仿真软件,于1979年成立,用于开发欧洲交通模型[15]。Windows平台,支持二次开发,模型较完备,可信度较高[16–18]。费用昂贵(十万起[19]),相关论坛及教程较少。
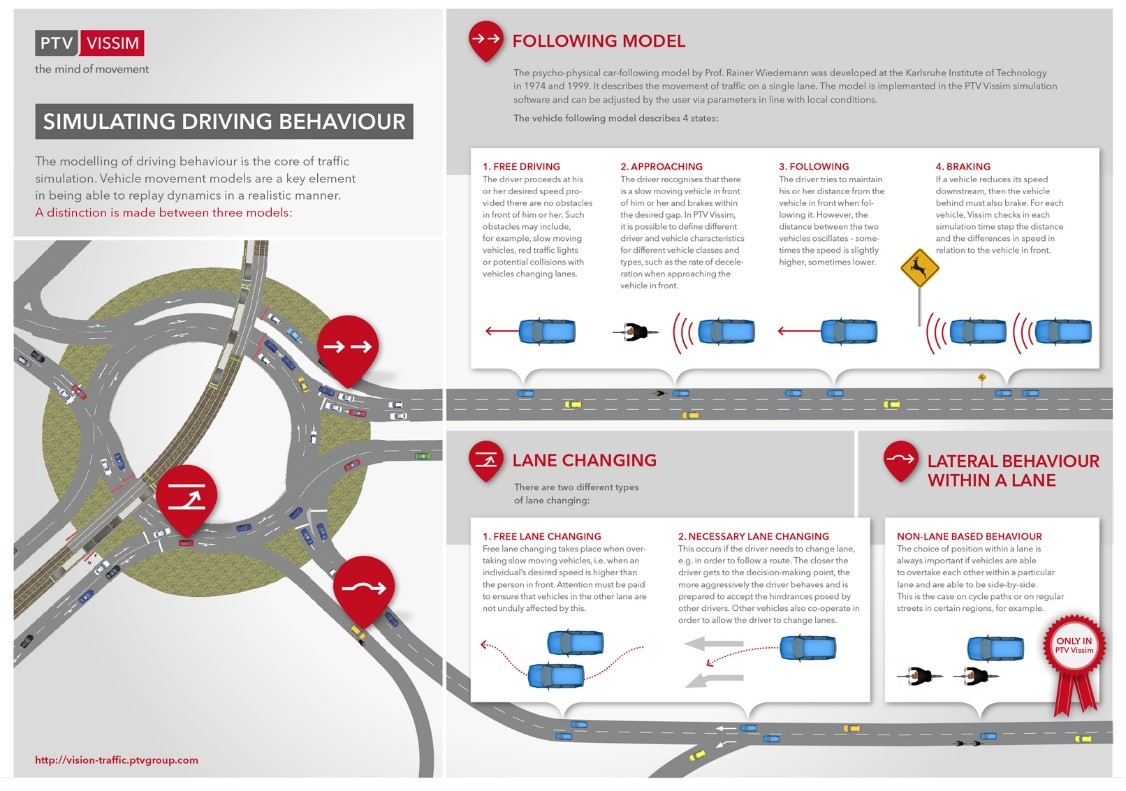
链接:http://vision-traffic.ptvgroup.com/en-us/products/ptv-vissim/
SUMO:由德国航空航天中心下属的交通系统研究所开发,开源交通流仿真软件,支持跨平台开发[20]。模型不够完善,如缺少非机动车专用模型[21],因此可信度存疑。
链接:https://sumo.dlr.de/docs/index.html
TESS NG:同济大学孙剑教授课题组于2006年开始针对中国混合交通流运行特征开展了100多项模型创新和仿真系统应用实践[22],历经十数年开发的国产微观交通仿真软件,Windows平台,适应中国高密度、多冲突的交通流环境,模型较完备[23],可信度较高[24],开放外部接口模块调用并提供定制化用户服务。

链接:https://www.jidatraffic.com/tessng/
总结
无人驾驶的可靠性需要100辆车全年无休地路测225年才得以证明[3],而这几乎是不可能实现的,因此借助计算机仿真技术对无人驾驶系统进行虚拟测试与评价已成为行业普遍共识。其中微观交通流仿真是构造合理有效的仿真场景的关键技术,在交通工程的观点中,核心模型为机理解析型的跟驰与换道模型。然而现有的无人驾驶仿真平台都缺乏高逼真度交通流场景模拟能力,因此引入三个交通领域典型的微观交通流仿真软件:德国的VISSIM, SUMO和中国的TESS NG,期待壮大的国产无人驾驶仿真与交通流仿真平台!
参考文献:
[1] 世界卫生组织. 道路交通伤害. www.who.int/zh/news-room/fact-sheets/detail/road-traffic-injuries.
[2] Vision Zero - Wikipedia. en.wikipedia.org/wiki/Vision_Zero.
[3] KALRA N, PADDOCK S. Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability?[M]//Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability? RAND Corporation, 2016. DOI:10.7249/rr1478.
[4] Waypoint - The official Waymo blog: How simulation turns one flashing yellow light into thousands of hours of experience. blog.waymo.com/2019/08/how-simulation-turns-one-flashing.html.
[5] Inside Waymo's Secret World for Training Self-Driving Cars - The Atlantic. www.theatlantic.com/technology/archive/2017/08/inside-waymos-secret-testing-and-simulation-facilities/537648/.
[6] 美国密歇根大学Mcity研究中心主任/教授彭晖:自动化车辆——当前状态,未来趋势以及我们在Mcity所做的工作. www.autochinazh.com/news/201811269574.html.
[7] 中国首部自动驾驶仿真蓝皮书重磅发布!汽车工业原创科技已经崛起. news.eeworld.com.cn/qcdz/ic463371.html.
[8] ELROFAI H, PAARDEKOOPER J P, GELDER E de等. StreetWise: scenario-based safety validation of connected automated driving[J]. 2018. TNO, 2018.
[9] FRAADE-BLANAR L, BLUMENTHAL M, ANDERSON J等. Measuring Automated Vehicle Safety: Forging a Framework[M]//Measuring Automated Vehicle Safety: Forging a Framework. RAND Corporation, 2018. DOI:10.7249/rr2662.
[10] VAN WAGENINGEN-KESSELS F, VAN LINT H, VUIK K等. Genealogy of traffic flow models[J]. EURO Journal on Transportation and Logistics, 2015, 4(4): 445–473. DOI:10.1007/s13676-014-0045-5.
[11] Junction Geometry. vision-traffic.ptvgroup.com/en-us/products/ptv-vissim/use-cases/junction-geometry/.
[12] Safety Report – Waymo. waymo.com/safety/.
[13] BRACKSTONE M, MCDONALD M. Car-following: A historical review[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 1999, 2(4): 181–196. DOI:10.1016/S1369-8478(00)00005-X.
[14] ZHENG Z. Recent developments and research needs in modeling lane changing[J]. Transportation Research Part B: Methodological, 2014, 60: 16–32. DOI:10.1016/j.trb.2013.11.009.
[15] PTV VISSIM - Wikipedia. en.wikipedia.org/wiki/PTV_VISSIM.
[16] Professional Traffic Simulation Software | PTV Group. www.ptvgroup.com/en/solutions/products/ptv-vissim/why-ptv-vissim/.
[17] Detailed Traffic Simulation Software | PTV Group. www.ptvgroup.com/en/solutions/products/ptv-vissim/.
[18] Software for multimodal traffic simulation: PTV Vissim. www.ptvgroup.com/en-us/solutions/products/ptv-vissim/.
[19] PTV-VISSIM-软件下载,正版软件购买,软件试用,软件功能介绍,软件评价—软服之家. www.ruanfujia.com/software/67392/.
[20] SUMO Documentation. sumo.dlr.de/docs/index.html.
[21] Simulation/Bicycles - SUMO Documentation. sumo.dlr.de/docs/Simulation/Bicycles.html.
[22] TOPS_交通运行与仿真课题组. tops.tongji.edu.cn.
[23] 论文专著_科学研究_TOPS课题组. tops.tongji.edu.cn/research/publications.
[24] 系统研发_工程实践_TOPS课题组. tops.tongji.edu.cn/practice/systems.
[25] 欢迎使用TESS NG - 济达交通. jidatraffic.com/tessng/.
最近更新:2020年7月13日 17:13:00
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}
{kind=link}