数字孪生技术起源于航空航天,用于同步物理实体与数字模型。这一技术降低了研发和运维成本,并在制造、建筑、医疗、农业等领域有广泛应用。道路交通系统一直面临监测和优化的挑战,《数字交通发展规划纲要》指出数据是关键,需促进物理与虚拟空间的融合。数字孪生为交通系统管控提供了理论和技术框架,整合数据和优化能力,有望提升监测、诊断和预测精度,支持决策优化。在交通信号控制、匝道管理等方面已有应用(如图1所示),但目前仍以可视化复现交通场景为主,需重视建模、预测和优化能力的发展。此外,需加强新交通技术研究,如轨迹数据治理和协同管控优化,以推动交通系统数字孪生的可持续发展。

图1 交通相关数字孪生研究对象及其典型应用场景
为此,综合分析现有研究在可视化、诊断、管控与优化等方面的实践案例,并依据研究中数字模型与物理实体的各类连接交互关系,我们定义了道路交通系统数字孪生的四级成熟度VDMO模型(如图2所示)。
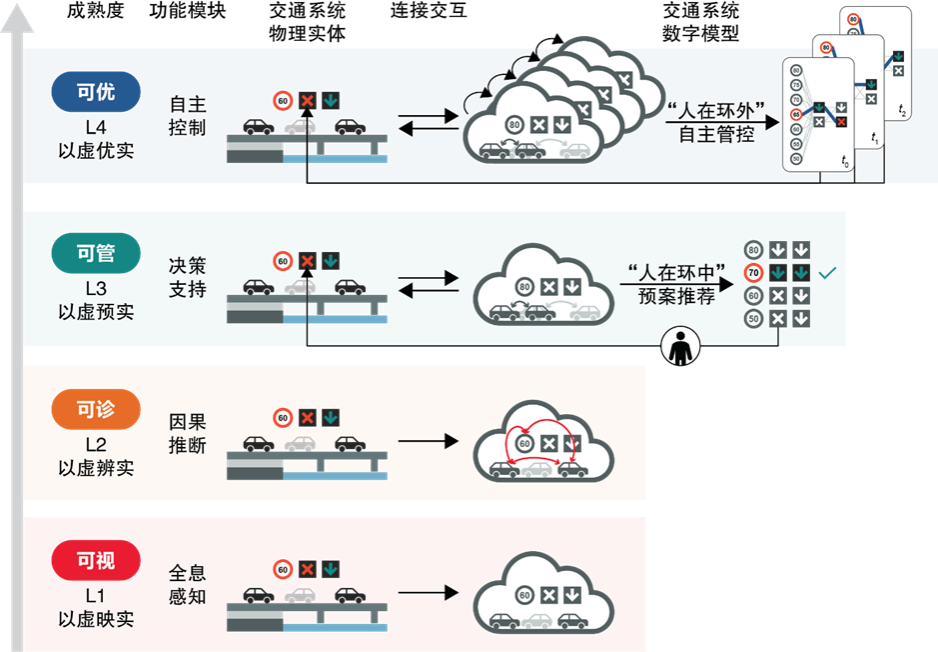
图2 道路交通系统数字孪生四级成熟度VDMO模型
第1级:可视L1(Visualizable)。数字模型与物理实体的关系是“以虚映实”,是指数字模型可以实时复现道路交通系统物理实体的实时状态与变化过程。
第2级:可诊L2(Diagnosable)。数字模型与物理实体的关系是“以虚辨实”,指数字模型在“可视”基础上,可以对道路交通系统运行态势进行实时评估与问题因果诊断。
第3级:可管L3(Manageable)。数字模型与物理实体的关系是“以虚预实”,指数字模型在“可诊”基础上,可以利用平行仿真推演,评估预定管控策略方案,辅助最优方案智能决策,实现间接管控道路交通系统物理实体的运行过程。
第4级:可优L4(Optimizable)。数字模型与物理实体的关系是“以虚优实”,指数字模型在“可控”基础上,可以在更大规模的管控策略空间内实现自主搜索最优管控策略,直接管控道路交通系统物理实体的运行过程。
“可视”(Visualizable)指道路交通系统数字模型可通过对部分可观测交通数据实时重构以获得完整的车辆轨迹(如图3所示),从而复现道路交通系统物理实体当前状态和历史演化过程,具备这样能力的道路交通系统数字孪生归为第一级(L1)。
关键科学问题:融合有限观测数据重构全样本个体轨迹。“可视”强调以虚映实,全息感知与可视化需要实现3个转变:①从集计断面和有偏采样的数据采集转变为时空连续个体全样本数据感知,②交通参与者从状态描述转变为行为刻画,③感知频率从分钟级频次转变为秒级频次。需要突破的核心关键技术是轨迹数据治理与重构。
图3 检测盲区车辆全样本轨迹重构问题
研究重点:雷达视频轨迹数据可提供丰富的个体车辆位置、速度、加速度等微观信息。这些信息可进一步集计为宏观数据,是宏微观交通分析的重要数据来源。由于设备布设成本约束,该类轨迹数据的空间覆盖范围非常有限,难以大规模化。相比之下,浮动车GPS轨迹覆盖空间范围更大,但渗漏率低,仅能保证被采样车辆的轨迹规模和细节,使得对背景交通流的轨迹推断充满挑战。因此,融合固定检测、浮动车检测轨迹、CAV轨迹等多种数据源,在大规模路网中重构全样本车辆轨迹是未来的研究重点和难点。要取得精度与可扩展性的平衡,需要在传统交通流模型、路径选择模型与数据驱动的轨迹预测和路径预测模型中进行研究。
“可诊”指道路交通系统数字模型可利用车辆轨迹、道路高精度地图、环境等人-车-路环境要素感知数据,实施精细化道路交通系统效率与安全的致因诊断(如图4所示),具备这样能力的道路交通数字孪生归为第二级(L2)。
关键科学问题:基于全息数据的道路交通系统事件因果推断。“可诊”强调以虚辨实,因果推断,实现3个转变:①从问题发现到成因分析,②从基于集计数据的关联关系推断到基于全息数据的因果关系诊断,③从多因素致因分析到全因素致因分析。
图4 典型交叉口拥堵“评-诊-治”知识图谱
研究重点:与集计的交通流量、速度和其他数据相比,轨迹数据大大丰富了道路交通系统诊断的细节。在道路交通系统诊断中,轨迹数据可以精细地描述拥堵形成的微观过程,并支持对道路交通系统问题(如路段和交叉口)原因的分析和推断。然而,这种方法主要依赖于宏观和微观交通流方法,难以在大型道路网络中标定,并且很难获得完整和准确的轨迹数据,限制了其可扩展性。因此,一些研究仅使用路段的集计宏观状态来建立拥堵状态转移概率模型,并基于该模型拥堵传播和溯源等道路交通系统诊断。虽然这种方法适用于大型道路网络,但其诊断结果往往偏向相关性分析,需要大量数据来近似因果关系或采用仿真或其他受控试验来推断因果关系。因此,基于全样本车辆轨迹数据重构的“可视”道路交通数字孪生,建立道路交通系统事件的因果关系链和知识图谱是未来重要的研究方向,对于突破道路交通系统诊断的规模和粒度具有重要意义。例如,交通事故和交通拥堵密切相关。大量研究表明,拥堵程度与事故的概率和严重程度有关,但相关性长期以来并未得出定论。基于轨迹数据的大规模道路网络拥堵诊断研究可能为事故成因分析带来新的见解,同时也为其他道路交通系统诊断带来新的发现。
“可管”指数字模型可实时仿真推演未来交通态势,同时预估给定管控策略的实施效果,辅助半自主的管控方案决策(如图5所示),具备这样能力的道路交通数字孪生归为第三级(L3)。
关键科学问题:交通管控可信仿真预估与智能化决策支持。“可管”强调以虚预实,决策支持,实现3个转变:①从交通管控策略事后评估到交通管控策略事前预估;②预案从独立管控到协同管控;③从管控策略评估到精细化的决策支持。需要突破的核心关键技术是交通仿真。
图5 因果发现驱动的交通策略推荐系统
研究重点:为建立道路交通系统的管控决策支持,道路交通系统管控策略评估至关重要,它可以分为事前和事后评估。其中,事后评估可通过采集策略实施前后的车辆轨迹等数据,评价行程时间、车速和流率等关键交通参数。而事前评估主要通过交通仿真方法,在一些预定的交通需求场景下,评估策略的有效性。事后评估的难点在于交通数据采集,但随着众筹浮动车轨迹数据的普及,事后评估比以往更容易实施。相比之下,事前评估对于突发需求、事件等特殊交通场景下的管控策略调整和评估尤为必要,而交通仿真的高可信度则成为预评估有效性的关键。现有研究通常在离线场景下测试管控策略,难以等同于其在真实交通环境下的效果。在道路交通系统数字孪生框架下,建立依托实时数据流的在线交通仿真,确保其与非稳态道路交通系统物理实体的一致性是实现管控策略精准评估和决策支持的关键。参数在线标定和自学习,以及后续的决策支持和方案智能化推荐,均是未来的研究重点。
“可优”指数字模型可依托交通仿真实时、自主、协同优化管控策略,并在物理实体道路交通系统中持续执行最优策略(如图6所示),实现自主科学决策支持,具备这样能力的道路交通数字孪生归为第四级(L4)。
关键科学问题:道路交通系统自主快速协同管控优化。可优强调以虚优实,自主控制,实现3个转变:①管控策略离线优化到管控策略在线优化;②从预定方案到方案自动生成;③从“人在环中”决策转变为“人在环外”的自主控制。需要突破的核心关键技术是协同管控优化。
图6 自主式交通系统异智能车辆协同调度优化
研究重点:自主交通控制可以降低“人在环中”的决策介入程度,提升交通管控的效率。然而,实时交通仿真上做管控策略优化是一个艰难的任务,因为交通仿真具有随机、非线性、决策变量部分连续部分离散的复杂特性。在进行协同管控策略优化时,利用交通仿真评估管控策略本是非常耗费计算资源的。若要求解最优策略,则将面临非线性混合整数约束规划问题。为了应对这些困难,实现交通管控实时自主优化,需要研究元启发式优化、代理优化与强化学习等不同类别的控制优化方法。在实时交通管控策略优化问题中,由于时间预算非常紧,元启发式优化和代理优化可能各有优劣,可以相互比较或结合使用(代理元启发式优化),达到最优性与求解效率的平衡。相对而言,强化学习可能不是最适宜的选择,因为其训练开销大,很难做到短时间的求解。同时,在管控优化问题是实时的情况下,求解适应不同交通状态的管控策略的实用性有限。在当前仿真条件下得到的强化学习策略可能无法直接迁移到下一时刻的仿真系统,因为这两个系统的动态过程已经不同。由此,快速的协同优化与自主控制是未来的研究重点。
国家自然科学基金(52125208):交通系统建模与优化,2022-2026
国家自然科学基金(52302413):城市路网拥堵渗流生成机理与路径管控策略,2024-2026
国家重点研发计划(2023YFB4301900):异智交通流路车协同计算与级联控制,2024-2026
国家重点研发计划(2022YFB2602104):城市交通基础设施数字孪生系统构建共性技术,2023-2025
上海市科委项目(22dz1203200):超大城市交通系统精准研策关键技术及应用示范,2022-2025
宝康智能交通联合实验室:基于新型数据源的交叉口交通状态估计与控制优化研究,2021-2022
浙江省科技厅重大项目:基于数字孪生的智慧高速公路交通流全时空管控关键技术及应用示范,2020-2022
同济-商汤:Sense Traffic智能交通联合实验室—路网全量车辆出行路径重构,2021-2022
杭绍甬智慧高速:基于车路协同的智慧高速主动管控技术研究,2020-2022
中央高校交叉学科重点项目(1600219256):基于大数据的出行行为时空轨迹计算与深度挖掘,2015-2018
深圳榕亨实业集团:深圳市中心城区交通仿真与控制关键技术研究,2016-2017
滴滴出行:基于新型数据源的交叉口状态估计与信号控制,2016-2017
上海市科委:中心城区交通拥堵节点仿真诊断决策系统与联动控制技术研究,2016-2018
上海市科委:基于车路画像的交通管控关键技术研究,2018-2019
华为公司:车路协同价值应用场景研究及价值评估,2019-2020
上海城建院:车路协同仿真关键技术研究,2019-2021
阅读() 最近更新:2021年12月01日 19:45:39
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次




{kind=link}