首页 » 科学研究 » 交通数据分析与主动管控
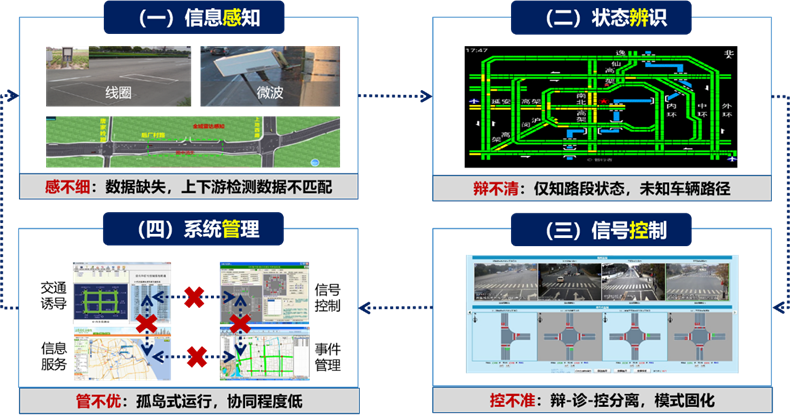
现有交通系统中存在感不细,辨不清,控不准,管不优等4大问题。团队聚焦于信息感知(感),状态辨识(辨),信号控制(控),系统管理(管),致力于在交通数据分析与主动管控方面取得新突破,包括:(1)针对雷达、雷视一体等定点检测设备以及FCD等移动检测器等存在的数据缺失,检测误差、通讯误差、上下游检测数据不匹配等问题,研究如何实现数据动态修复,二次提升检测精度;(2)针对现有技术仅知路段状态,未知车辆路径,无法精确辨识个体车辆状态以及拥堵溯源等典型问题,从点、线、面三个维度研究实现全样本车辆轨迹、全量完整路径重构的突破;(3)针对交通运行优化评价-诊断-控制分离,模式固化的问题,采用基于关键路径的信号优化控制,实现知识驱动的路网级评价-诊断-控制一体化;(4)针对多个管控系统孤岛式运行,协同程度低的问题,采用知识图谱和仿真优化,实现不同管控系统快速优化和多系统最优管控策略求解。
研究方向解读
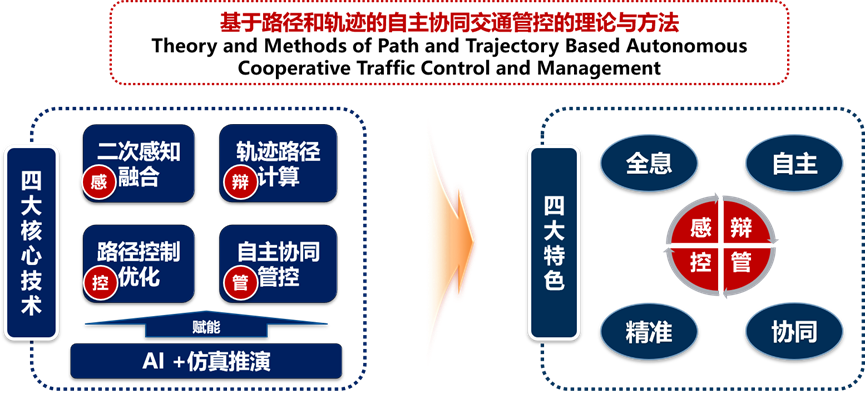
团队聚焦以轨迹/路径数据为基础,配合AI+仿真赋能,自主研发全息感知、全域辨识、精准控制、自主协同四大核心技术,形成全息,自主,精准,协同的新一代城市交通协同管控。
研究目标
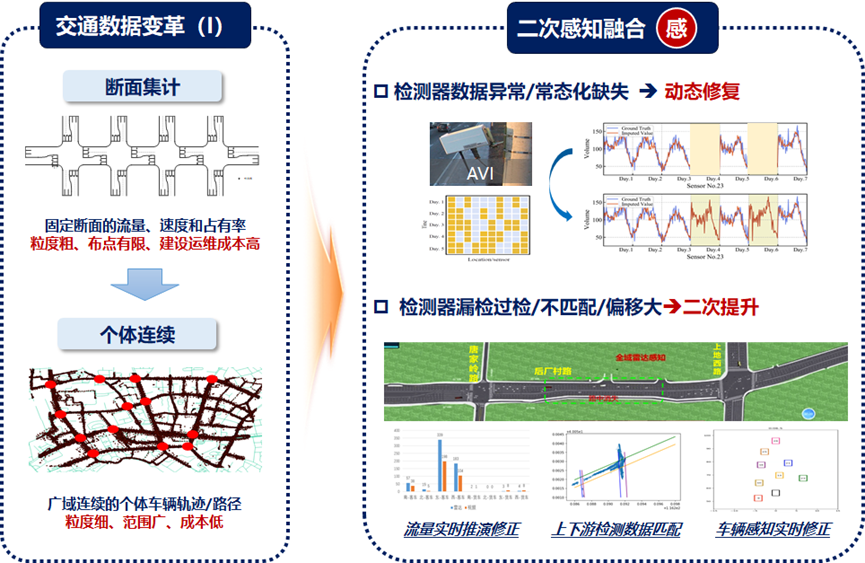
1.检测数据二次感知融合
通信技术的发展为交通信息的检测带来了重大进步,数据采集从传统的固定断面集计数据逐步转变为粒度更细、范围更广的连续个体车辆轨迹和路径。然而,布局密度、抽样比例、检测误差等使该类数据仍面临漏检过检、常态化/异常缺失、轨迹漂移、上下游不匹配等问题。亟需研发缩小检测误差的全息感知方法,准确判断交通运行状态,满足智能网联环境下交通管控需求。
二次感知融合结合信息论与交通流理论等方法,对现有异常、缺失数据进行动态修复,对漏检过检、不匹配和偏移数据等进行二次提升。通过交通流关键参数实时推演,实时修正上下游检测数据匹配和车辆感知,实现交通数据的精准修复和交通路网全要素计算感知。
“感”知全息
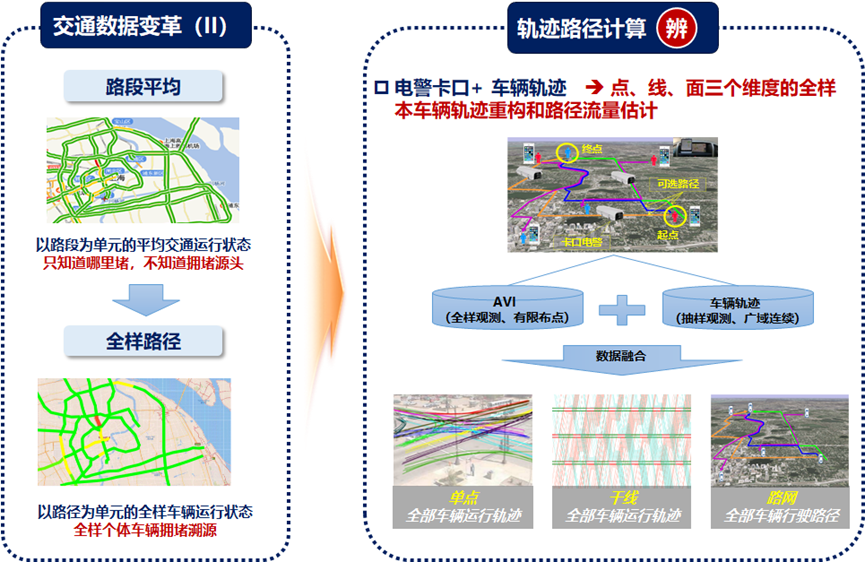
2.轨迹路径计算
移动检测器为交通领域提供了更好更新的数据源,让实时估计个体交通状态成为可能。但是由于观测有限,仍然不能获取道路内所有个体车辆的行驶轨迹和路径,使得现阶段的交通状态评估仍受限于以路段为单元的平均交通状态,拥堵无法溯源。
轨迹路径计算力求实现以个体车辆为单元的运行状态辨识。通过结合布点有限的AVI数据与广域连续的车辆轨迹数据,进行全部车辆运行轨迹和行驶路径的全样本重构。
“辨”识全域
3.路径控制优化
模型驱动的信号控制算法优化复杂,求解困难,数据利用率低。随着信号控制算法不断迭代更新,基于数据驱动的优化配时方案也逐渐增多。但是现阶段很多研究局限于单点交叉口或者单条干道,忽略了整个路网的整体效益,缺乏拥堵产生的关键路径溯源诊断,未能体现大数据时代智能管控的优势所在。
路径控制优化采用数据+知识驱动的方法,提高数据利用率,适用于复杂优化问题。一方面对路网中拥堵产生的关键路径采用不同信控策略进行优化;另一方面对拥堵进行溯源,针对拥堵源头的信号控制、交通设计和管理等进行问题诊断,再对路网进行全局优化,实现评价—诊断—控制一体化的管控闭环。
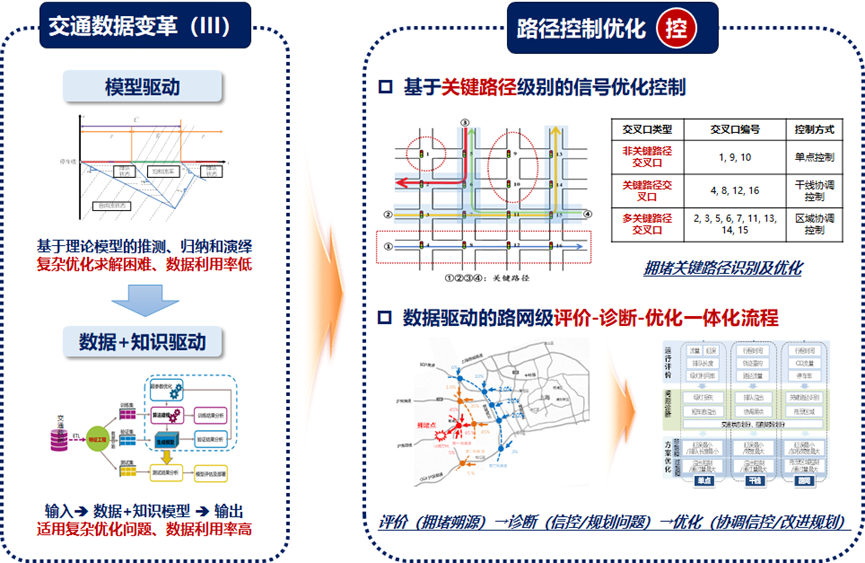
“控”制精准
4.自主协同管控
“集成式”交通平台多通过对固定预案进行人工决策实现交通系统管控,然而,平台模块之间数据不互通,决策多为固定人工预案,紧急情况应对能力不足等问题亟待解决。
自主协同管控将AI仿真推演与方案生成技术相结合,利用知识图谱的方法,根据历史数据对管控平台进行快速优化。结合仿真优化的方法,采用基于元模型的分层快速仿真优化,可以快速评估每种方案的效果及不足,弥补知识图谱方法寻优困难的短板,以实现最优策略的求解。
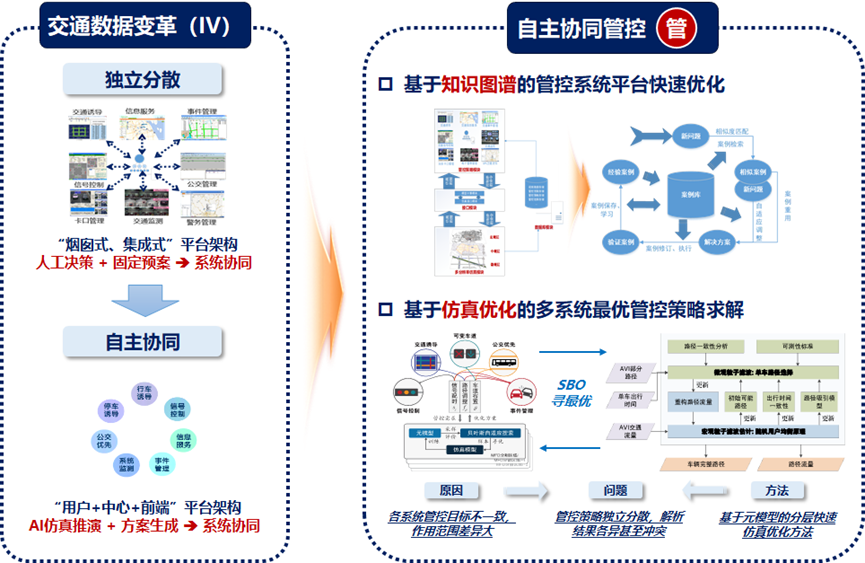
“管”理协同
科研课题
国家自然科学基金(52125208):交通系统建模与优化,2022-2026
上海市科委项目,城市交通系统研策宏中微全过程多态推演技术(22dz1203200),2022-2025.
宝康智能交通联合实验室:基于新型数据源的交叉口交通状态估计与控制优化研究,2021-2022
浙江省科技厅重大项目:基于数字孪生的智慧高速公路交通流全时空管控关键技术及应用示范,2020-2022
同济-商汤:Sense Traffic智能交通联合实验室—路网全量车辆出行路径重构,2021-2022
杭绍甬智慧高速:基于车路协同的智慧高速主动管控技术研究,2020-2022
中央高校交叉学科重点项目(1600219256):基于大数据的出行行为时空轨迹计算与深度挖掘,2015-2018
深圳榕亨实业集团:深圳市中心城区交通仿真与控制关键技术研究,2016~2017
滴滴出行:基于新型数据源的交叉口状态估计与信号控制,2016~2017
上海市科委:中心城区交通拥堵节点仿真诊断决策系统与联动控制技术研究,2016~2018
上海市科委:基于车路画像的交通管控关键技术研究,2018~2019
华为公司:车路协同价值应用场景研究及价值评估,2019-2020
上海城建院:车路协同仿真关键技术研究,2019-2021
阅读() 最近更新:2021年12月01日 19:45:39
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次




{kind=link}